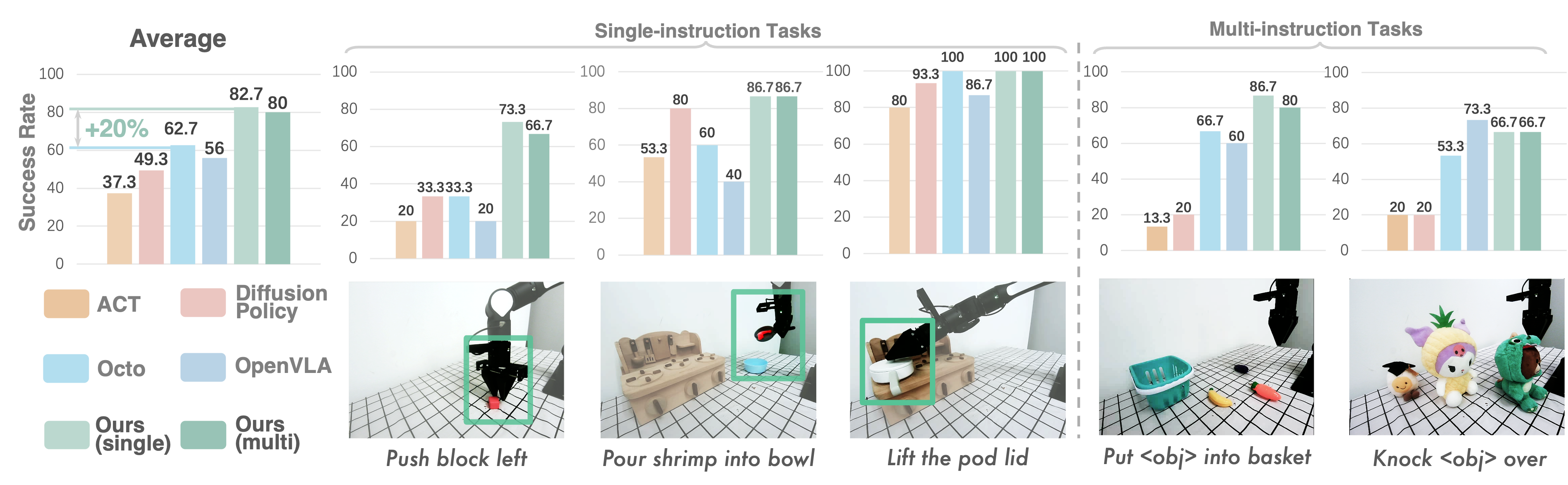
All real-world experiments are conducted with an AIRBOT Play robotic arm featuring a 7-DoF action space and a third-view RGB camera. We evaluate different policies on both single-instruction tasks ("Lift the Pod Lid", "Pour Shrimp into Bowl", and "Push the Block Left") and multi-instruction tasks ("Put [object] into Basket" and Knock [object] Over").
The following experiments are conducted with a NVIDIA RTX 4060 laptop GPU with only 8GB memories. We perform 4-bit quantization to OpenVLA and our generalist model to fit in the device. Specialist of RoboDual can still run at full precision.
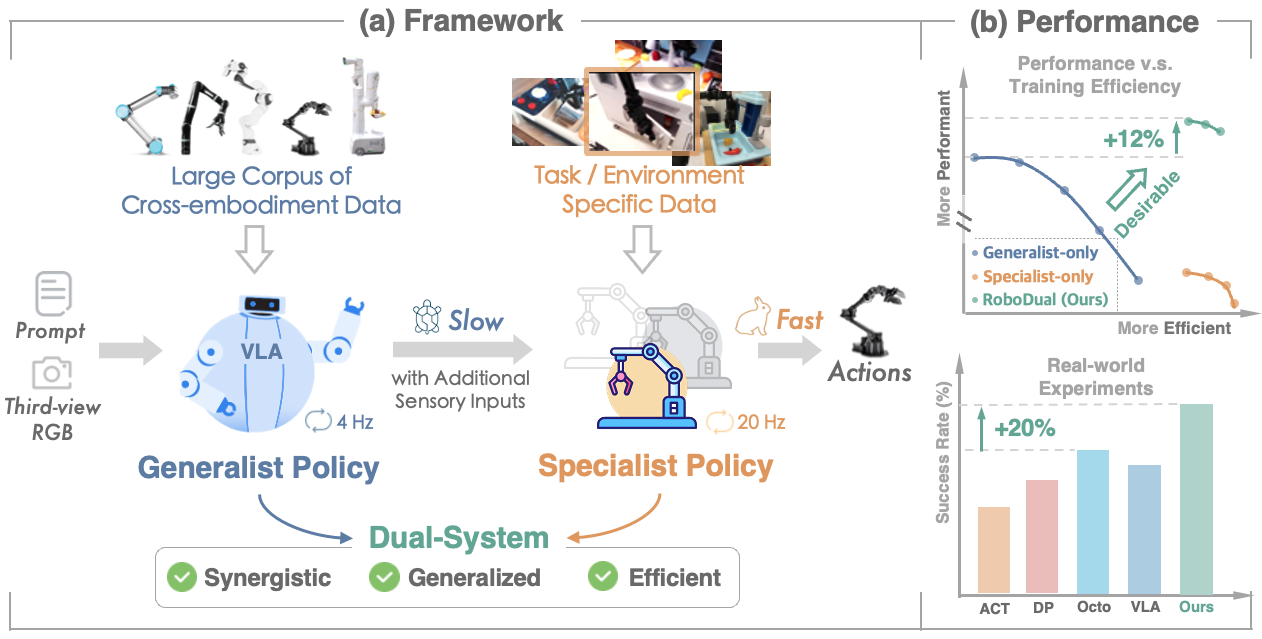
Robodual achieves a control frequency of 15 Hz in our real-world setup using NVIDIA A5000 Ada GPUs, facilitating deployment in more dexterous tasks. Notably, inference latency is a primary factor contributing to the performance degradation of OpenVLA. Operating at only 3.9 Hz within our system, it significantly alters the system dynamics compared to the 20 Hz non-blocking controller used in our real-world tasks.